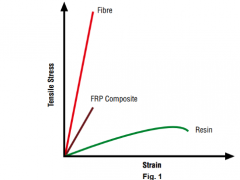
碳纤维增强复合材料(CFRP)因其高强度、低密度和良好的耐腐蚀性,在航空航天、汽车制造、体育器材等领域得到广泛应用。然而,CFRP的硬度和各向异性特性给其表面加工带来了挑战。传统的手工磨抛方法不仅效率低下,而且难以保证加工质量的一致性。因此,开发高效的机器人磨抛系统,实现CFRP的高质量加工,成为当前研究的热点。本文旨在探讨碳纤维增强复合材料机器人磨抛系统的力位混合控制策略与工艺参数优化方法。

一、碳纤维增强复合材料机器人磨抛系统概述
碳纤维增强复合材料机器人磨抛系统主要由工业机器人、磨抛工具、控制系统及传感器等组成。工业机器人负责执行磨抛任务,磨抛工具则直接作用于CFRP表面,控制系统负责协调机器人的运动与力控制,传感器则用于实时监测磨抛过程中的关键参数。
二、力位混合控制策略
力控制策略
在磨抛过程中,接触力的大小直接影响加工质量和效率。为了实现恒定的磨抛力,本文采用基于力传感器的力控制策略。通过实时监测磨抛工具与CFRP表面之间的接触力,控制系统可以动态调整机器人的运动轨迹,确保磨抛力保持在预设范围内。
位置控制策略
位置控制策略旨在确保机器人能够按照预定的轨迹进行磨抛。为了实现高精度的位置控制,本文采用基于视觉伺服的控制系统。通过摄像头实时监测磨抛工具的位置,并与预设轨迹进行对比,控制系统可以实时调整机器人的运动参数,确保磨抛轨迹的准确性。
力位混合控制策略
结合力控制与位置控制策略,本文提出一种力位混合控制策略。在磨抛过程中,控制系统根据实时监测的接触力和位置信息,动态调整机器人的运动轨迹和磨抛力,以实现高质量的磨抛加工。
三、工艺参数优化方法
试验设计
为了研究不同工艺参数对磨抛质量的影响,本文采用正交试验设计。选取主轴转速、机器人移动速度、磨抛正压力、砂纸粒度等关键参数作为试验因素,每个因素设置多个水平,通过正交试验表安排试验方案。
响应面法优化
在正交试验的基础上,本文采用响应面法(RSM)对工艺参数进行优化。通过构建响应面模型,预测不同工艺参数组合下的磨抛质量,并找出最优参数组合。
验证试验
为了验证优化结果的准确性,本文进行了一系列验证试验。将最优参数组合应用于实际磨抛过程中,通过测量加工后的表面粗糙度和材料去除率等指标,评估优化效果。
四、研究结果与讨论
通过力位混合控制策略与工艺参数优化方法的实施,本文成功实现了CFRP的高质量磨抛加工。实验结果表明,优化后的工艺参数组合可以显著提高磨抛效率,同时降低表面粗糙度,满足实际应用需求。此外,力位混合控制策略有效提高了磨抛过程的稳定性和可控性,为CFRP的自动化加工提供了有力支持。
本文研究了碳纤维增强复合材料机器人磨抛系统的力位混合控制与工艺参数优化方法。通过正交试验设计和响应面法优化,成功找出了最优工艺参数组合,实现了高质量的磨抛加工。未来,将进一步研究更加智能的磨抛控制策略,如基于机器学习的自适应控制方法,以提高磨抛系统的灵活性和智能化水平。同时,将探索更多类型的磨抛工具和材料,以拓宽CFRP加工的应用范围。